Недавно внимание любителей новых технологий и настольного тенниса было привлечено к анонсированному немецкой компанией Kuka Robot Group поединку между одной из её машин и звездой настольного тенниса Тимо Боллем. Но давайте обо всём по порядку, и начнём с небольшого исторического экскурса, как появились роботы в этом виде спорта.
В 1970 году в возрасте 20 лет студент инженерного факультета по имени Харальд Меркт (Harald Merkt) начал играть в настольный теннис. Из-за позднего начала занятий спортом он оказался в невыгодном положении по сравнению с игроками, которые начали играть в теннис с раннего детства. Чтобы быть успешным и конкурентоспособным Харальду потребовалось компенсировать недостаток опыта за очень короткое время. Сначала для улучшения качества подачи он установил за столом сетку. Вскоре этот метод обучения был уже недостаточен. Тогда Харальд продолжил свои инженерные изыскания в области подач в настольном теннисе. Он выступил с идеей проектирования автоматических роботов, которые позволили бы практиковаться в ударах без партнёра и без ограничения по времени. Спустя год работы прототип робота (включавший двигатель от швейной машины и трансформатор от модели железной дороги) был готов для тренировок. Вскоре коллеги Харальда в местном клубе отметили большой шаг вперёд в его игре. Когда они узнали, что это произошло после тренировок с роботом, которого он создал, они захотели иметь такую же возможность для улучшения техники игры. В результате 1 августа 1974 года в городе Хорб-на-Неккаре, недалеко от Штутгарта, была основана компания H.Merkt Apparatebau, производящая машины для улучшения практики игры любителей настольного тенниса.

Для XXI века такие машины, конечно, уже не редкость. Два самых распространённых типа роботов – настольный и напольный. Первый ставится на крышку стола, второй, как понятно из названия, — на пол. Его, в свою очередь, можно разделить на два вида: одинарный робот и двойной. В первом случае – одна пушка. Во втором – две, которые могут выполнять самостоятельные программы.
В 2008 году во время чемпионата Европы в Санкт-Петербурге был представлен китайский напольный робот Taide, главным отличием которого является наличие руки. Это принципиальный момент, ибо в случае с пушками предугадать начало вылета мяча невозможно, тогда как наличие у робота руки делает ситуацию ближе к игровой.

Но наши сегодняшние герои – не роботы-тренажёры, а немного другие «игрушки». В 2011 году исследователи из университета провинции Чжэцзян в Восточном Китае показали игру двух человекоподобных роботов. Это роботы-близнецы Конг (Kong) и Ву (Wu), которые имеют рост 160 см, вес 55 кг и около 30 степеней свободы (7 в каждой руке). Правая рука робота держит теннисную ракетку, а левая — имеет три пальца, которыми можно поднять и использовать мяч.
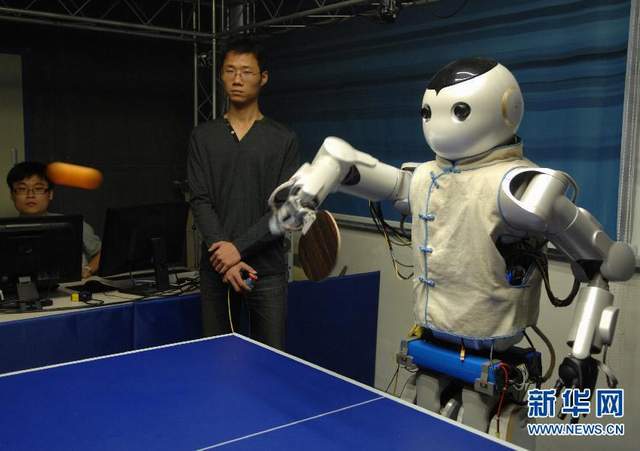
Роботы оснащены камерой и блоком обработки видеоданных, который позволяет отслеживать траекторию мяча и оперативно реагировать в режиме реального времени. Камеры фиксируют действия при 120 кадрах в секунду. Время реакции от 0,05 до 0,1 секунды и точность позиционирования ракетки до 2,5 см позволяют роботам успешно проводить теннисные матчи, как между собой, так и с человеком. На создание таких «спортсменов» ушло четыре года.
Игра в теннис — не единственная цель разработки китайских ученых, это всего лишь способ продемонстрировать ловкость роботов и то, на что способно новое программное обеспечение. Конг и Ву были разработаны в рамках программы создания обслуживающих роботов для бытовых нужд.
Впрочем, это не первая разработка в этой области. Ещё в 2005 году вьетнамская компания TOSY начала проект TOPIO («TOSY Ping Pong Playing Robot») — это робот-андроид, разработанный для игры в настольный теннис против человека. Первая публичная демонстрация робота прошла в Токио на выставке International Robot Exhibition в ноябре 2007 года. Последняя версия робота — TOPIO 3.0 – была представлена на аналогичной выставке в 2009 году. В TOPIO 3.0 использованы безщёточные сервомоторы постоянного тока, модель обладает 39 степенями свободы, имеет рост 188 см и весит порядка 120 кг.
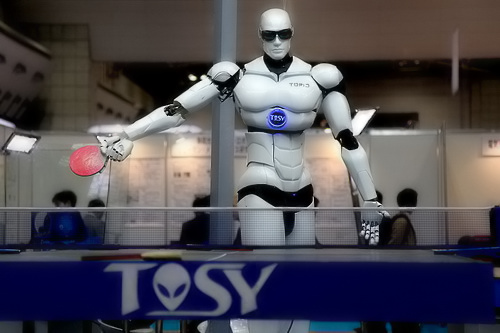
TOPIO 1.0 имеет высоту 185 см и весит 300 кг. В качестве привода используется гидравлическая система. Робот имеет шесть ног и две высокоскоростные камеры. TOPIO 1.0 обладает 20 степенями свободы: две приходятся на голову, по шесть степеней свободы на каждую руку, по одной степени свободы на каждую из шести ног.
Все версии робота используют самообучающуюся систему искусственного интеллекта, позволяющую роботу улучшать свои навыки в процессе игры. Но, похоже, на этом исследования компании в этой области закончились, и сейчас на официальном сайте TOSY можно увидеть уже других роботов.
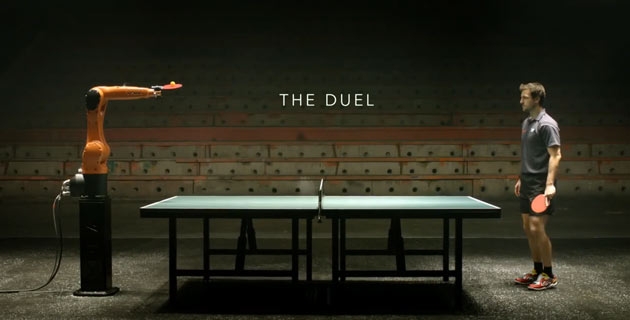
Вернёмся в настоящее время. В феврале нынешнего года немецкая робототехническая компания Kuka Robot Group объявила о поединке между роботом Agilus, основным предназначением которого является вовсе не спорт, а упаковка и погрузочно-разгрузочные операции, и немецким теннисистом Тимо Боллем. Дата матча была приурочена к открытию первого завода Kuka в Шанхае 11 марта.
Тимо Болл (Timo Boll) — немецкий игрок в настольный теннис, многократный чемпион Европы, двукратный победитель Кубка мира, 6-кратный призёр чемпионатов мира, вице-чемпион Олимпийских игр 2008 года в команде и бронзовый призёр Олимпийских игр 2012 года в команде, 5-кратный победитель турнира «Европа Топ-12». Экс-первая ракетка мира в одиночном разряде. Играет левой рукой европейской хваткой.
К сожалению, результат противостояния многих разочаровал. Как оказалось, видео является просто рекламой роботов Kuka, хотя и очень зрелищной. Сюжет развивается по типично голливудскому сценарию: вначале счёт очень быстро становится 6:0 в пользу робота. Но в итоге партия закончилась со счётом 11:9 в пользу человека. Впрочем, в настоящем спорте сюжеты бывают покруче любого кино, так что не стоит считать подобный сценарий совсем уж нереалистичным.
А здесь создатели видео рассказывают о том, как снимался рекламный ролик:
О других достижениях робототехники мы расскажем в наших следующих выпусках.